自1959年底美国科学家理查德费曼发表的著名演说“底部有很大空间”,指出这些可进入人体的微型机器可以通过“自下而上”的纳米加工技术制造以来,科研工作者一直梦想将科幻小说和电影中描绘的场景转变为现实应用。过去几年,贺强教授研究团队在国际率先运用‘自下而上’可控化学组装技术制造了各种能够将化学能或其它形式能量转化为自推进运动的游动微纳米机器人。今年,贺强教授研究团队在该领域再次取得系列研究进展,首次实现可重构液态金属游动纳米机器人集群,研究成果发表于Angew.Chem. Int. Ed.。
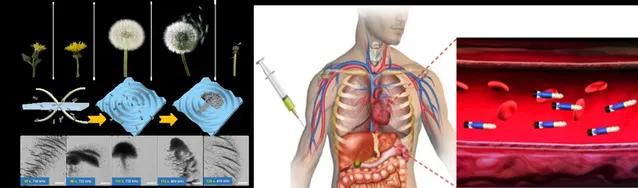
研究发现镓基液态金属在室温下呈液态,具有诸如流动性、低黏度、良好的生物相容性、高热导率等特性,使得镓基液态金属在可穿戴器件、柔性机器人和软物质材料等领域具有巨大的应用前景。贺强教授研究团队通过超声辅助的物理分散方法制备共晶镓铟合金棒状纳米机器人,直径为200 nm而长度为800 nm,外层由GaOOH形成的壳层稳定而内核为未氧化的液态金属。在驻波超声场的作用下,液态金属纳米机器人能够进行快速的自主运动,速度可达每秒50倍身长。通过将大量镓铟合金纳米机器人加入体系中,在可调制频率的驻波超声场作用下,游动纳米机器人群体产生涌现性并自发的聚集运动,随着频率的调节聚集体形态与运动行为逐步改变,呈现出模拟蒲公英生长、结实、随风传播种子的准二维动态图案。这种液态金属纳米机器人可以作为活性的组装单元构建可重构的纳米机器人集群,模拟生物体涌现性自组织行为特征,为下一代液态金属基活性软物质材料和智能机器人制造提供理论和技术基础。

